






기술지원
HOME > 기술지원 > TECH CENTER
TECH CENTER
 Limitations of MEMS Accelerometers-Instantel Whitepaper.pdf
Limitations of MEMS Accelerometers-Instantel Whitepaper.pdf Instantel사는 발파소음진동 측정 및 모니터링 분야에서 수십년간 높은 인지도를 보유한 장비로 전 세계적으로 매우 널리 알려져 있습니다. 수십년간 발파소음진동 측정 분야에서 가장 신뢰받고 사용되는 장비이며 전 세계 1위의 시장 점유율 보유하고 있는 발파소음진동 분야의 전문 기업 입니다.


최근 이 분야에 MEMS(Micro Electro Mechanical Systems) 마이크로 전자 기계 시스템 기술이 적용된 타입의 가속도센서를 건설 및 발파를 포함한 다양한 산업의 진동 측정 및 모니터링 장비에 사용고 있는 것을 종종 볼수 있으나 이는 자칫하면 잘못된 측정 결과를 초래할 수 있습니다.
그래서 Instantel사 는 최근 기존 솔레노이드 방식의 지오폰(Geophone) 센서와 MEMS 가속도계를 성능을 비교하하고 이를 분석하는 테스트를 수행하였습니다.


실험 결과는 MEMS 가속도계의 경우 높은 주파수(1,000+ Hz)의 진동성분이 많을 때 매우 불확실한 측정 결과를 나타내는 것을 확인하였습니다. 여러 실험 중에서 MEMS 가속도계는 솔레노이드 지오폰 보다 19배에서 45배 더 높은 진폭 값이 측정되었습니다. (아래 그림 1 참조).
고주파 진동의 원인으로는 대형 중장비, 잭해머(착암기), 항타기(Pile driver), HOE RAMS(Hydraulically Operated Excavator Rams, 돌, 콘크리트, 아스팔트 등과 같은 경도가 높은 재료를 파괴하는 장비, 주로 건설 및 광산업에서 사용됨), 폭발작업(공사장, 터널, 교량)등으로 인해 발생됩니다.
1. 진동 정류 오차 (VRE)
MEMS 제조 공정에서 내재된 비선형성과 비대칭성은 “진동 정류 오차”(Vibration Rectification Error , VRE)로 알려진 문제를 발생시킵니다. 진동정류오차(VRE)는 MEMS 가속도계의 출력 데이터에 매우 낮은 주파수 오프셋(데이터가 정중앙에 위치하지 않음)을 발생시킵니다. 높은 주파수의 RMS (Root Mean Square) 엔벨로프의 진폭이 증가함에 따라 오프셋의 크기도 증가합니다. 이러한 이유로 측정 장소 및 적용 분야에 따라 측정 데이터는 일관성이 없고 예측할 수 없기 때문에 데이터에 대한 신뢰성 수준이 낮아 지게 됩니다. 가속도 데이터의 오프셋으로 인해 결과적으로 잘못된 속도 신호로 계산될 수 있습니다. 이러한 오류는 진동 + 영역에서는 증가거나 진동 – 영역에서는 감소하는 형태로 발생될 수 있습니다. 대부분의 진동 측정 기준이 속도(Velocity)로 되어 있어서 이 오류는 결과에 치명적인 영향을 미칠 수 있습니다. 아래 그림은 동일한 진동 측정 결과를 MEMS 가속도계와 솔레노이드 지오폰이 기록한 것을 보여주는 것으로써 이에 대해 명확히 확인할 수 있습니다. 또한, 이러한 오프셋 현상으로 인해 MEMS 가속도센서가 측정할 수 있는 측정 범위가 줄어들 수 있고 측정 신호의 최대 진폭을 기록하지 못하는 이른바 “클리핑(Clipping)” 현상을 발생 시킬 수 있습니다.
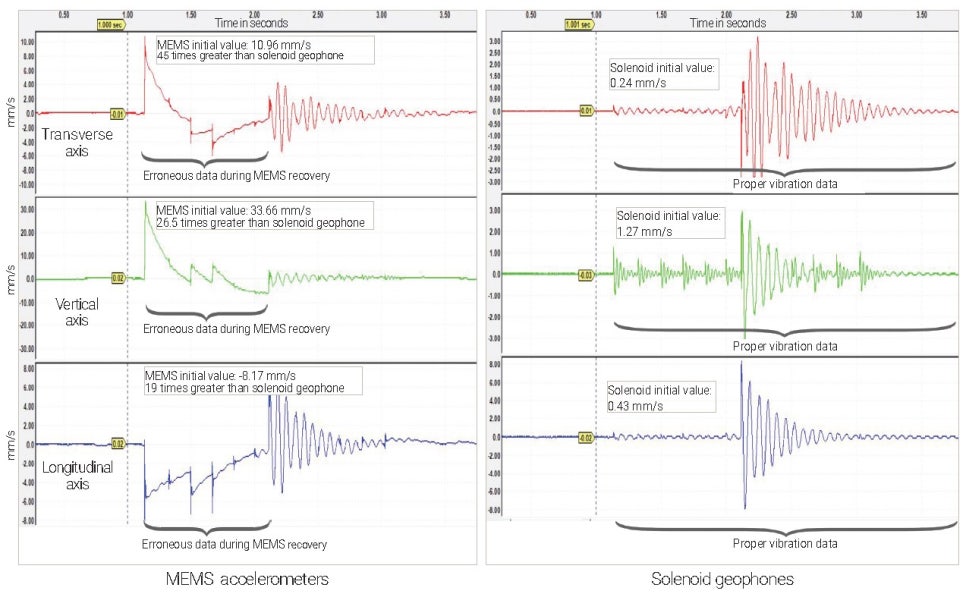
그림 1(왼쪽이 MEMS 가속도계로 측정한 진동 데이터, 오른쪽이 지오폰으로 측정한 진동 데이터)
측정에 대한 결론
MEMS 가속도계는 모든 세 방향(아래 방향 정보 참조)에서 +와 -영역에서 큰 진폭의 오프셋이 발생하였고 이로 인해 데이터의 신뢰성이 매우 적은 반면에 솔레노이드 방식의 지오폰은 매우 안정적이고 신뢰성 있는 측정 결과치를 나타내었으며 어떠한 신호의 손실도 보이지 않았습니다.
1. 횡파(S파, 전단파-Transverse):지표면에서 측정 시 중간에 동작하는 파로 , 다른 매질을 만나서 수직으로 전환되는 파.
2. 수직파(Rayleigh파-Vertical): 수직파로서 지표면 이동파.
3. 종파(P파, 압축파-Longitudinal): 지표면에서 측정 시 가정 먼저 도착하는 파
2. 고주파 및 MEMS 운영 제한
산업 및 건설 분야에서 발생되는 주요 진동원인은 대형 중장비, 잭해머(착암기), 항타기(Pile driver), HOE RAMS(Hydraulically Operated Excavator Rams, 돌, 콘크리트, 아스팔트 등과 같은 경도가 높은 재료를 파괴하는 장비, 주로 건설 및 광산업에서 사용됨), 폭발작업(공사장, 터널, 교량) 등에 의해서 주로 발생됩니다. 이러한 진동은 높게는 수 kHz의 주파수를 가진 충격 진동 형태로 발생됩니다. MEMS 가속도계는 솔레노이드 방식의 지오폰과 비교했을 때 이러한 고주파에 대해 기본적으로 더 취약하며 이는 잘못된 측정결과로 이어질 수 있습니다.
500 Hz 이상의 주파수는 대부분의 진동 측정 기준을 벗어나기 때문에 최종 진동 측정 결과에 반영되지 않도록 해야 합니다. 솔레노이드 방식의 지오폰 및 표준 필터 설계 방식은 매우 쉽게 500 Hz 이상의 신호를 제거할 수 있습니다. 반면 MEMS 가속도계의 경우, 모니터링 주파수를 초과하는 주파수의 진동은 간섭과 측정 오류를 발생시킬 수 있습니다. 주요 원인은 가속도를 속도 진폭으로 변환하는 것 (적분오차), 자체 공진 주파수 및 고주파 내용을 감쇠하기 위한 불충분한 필터로 인해 발생됩니다. 일부 오류는 MEMS 가속도계의 내부 구조원리에 의한 것이므로 이는 MEMS 가속도계의 어쩔 수 없는 구조적 한계입니다.
이러한 고주파를 생성하는 원인은 MEMS 가속도계의 사용 범위의 한계로써 이 경우 신뢰할 수 없는 데이터가 일관되게 측정될 수 있습니다. 또한 MEMS 가속도계의 필터 특성 상 진동 출력이 완전히 안정화되기까지 다소 시간이 소요될 수 있습니다. (아래 그림 2A 참조).
중요한 건, 이 기간 동안 MEMS 진동 센서로 측정된 데이터는 신뢰성이 없습니다. 착암기, 항타기, 중장비, 폭발작업 및 기타 유사한 진동은 주로 1~2초 미만이기 때문에 대부분의 진동 측정 데이터가 정확하게 측정되지 않거나 심지어 전혀 측정이 안될 수 도 있습니다. 인스탄텔(Instantel)에서는 이러한 고주파를 시뮬레이션하기 위해 사전 제작된 콘크리트 폼에 MEMS 가속도계와 솔레노이드 지오폰을 부착하고 고정된 망치로 타격을 하여 착암기나 항타기와 같은 유사한 진동 주파수 신호를 발생시켰습니다. 그림 2A는 MEMS 가속도계가 진폭 범위를 초과하는 데이터를 발생시키는 것을 보여줍니다. 또한 MEMS 가속도계는 안정화 되기 까지 4초가 걸렸습니다. 이 4초 동안 데이터가 기록되었지만 해당 데이터는 전혀 유효하지 않았습니다. 이는 4초간의 진동 데이터가 손실되었음을 의미 합니다.
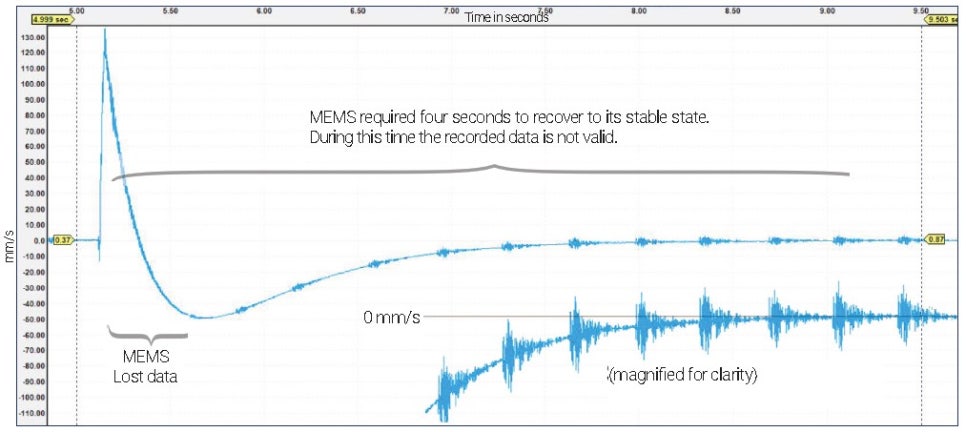
그림2A
반면에 아래 그림 2B에서 보이는 것과 같이 솔레노이드 지오폰이 기록한 동일한 이벤트 데이터를 보여줍니다.
이 기록은 이벤트 시간 동안 정확히 이벤트 데이터를 기록했습니다.
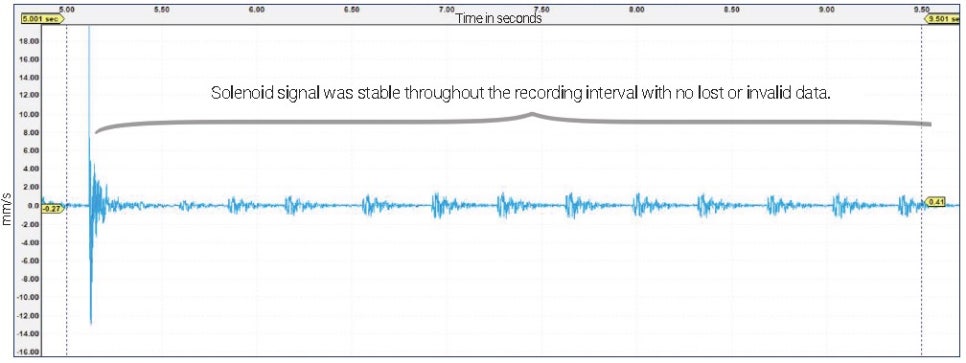
그림2B
측정에 대한 결론
MEMS 기반 시스템은 회복 단계에서 진동 파형을 정확하게 기록하지 않았으며 데이터를 왜곡했습니다. 반면에 솔레노이드 지오폰은 관찰 기간 동안 진동 파형을 정확하게 기록하고 어떠한 데이터도 손실하지 않았습니다.
3. 앨리어싱(Aliasing)
앨리어싱이란 샘플링(Sampling)하는 과정에서 원신호를 정상적으로 복원하지 못하고 “일그러짐”이 발생하는 것을 말합니다. 즉, 신호의 왜곡이 발생하는 현상으로서 각기 다른 신호를 구별해 내지 못하게 하는 현상입니다. 앨리어싱은 불필요한 고주파가 관심 주파수를 왜곡하여 수집된 데이터를 손상시킬 때 발생할 수 있습니다. 특히, 고주파가 충분히 빠르게 샘플링되지 않을 때 앨리어싱이 발생할 수 있습니다. MEMS 가속도계와 솔레노이드 지오폰 모두에서 앨리어싱이 발생할 수 있지만, 솔레노이드는 같은 지면의 진동 운동에 대해 MEMS보다 고주파에서 낮은 진폭을 생성합니다. 이로 인해 MEMS 가속도계는 고주파로 인한 왜곡에 매우 민감하며, 진동 측정 및 모니터링 장비는 설계 시 이를 고려해야 합니다. MEMS 가속도계는 솔레노이드 방식의 지오폰과 동일한 데이터 무결성을 제공하기 위해 훨씬 더 높은 속도로 샘플링되어야만 합니다.
4. Noise 및 Noise Floor
Noise Floor는 진동 신호를 취득 또는 모니터링할 때 매우 중요합니다. 이는 실제 신호 존재 하는 상태와 없는 상태를 구별할 수 있어야 합니다. MEMS 가속도계의 단점은 질량(Mass)가 작기 때문에 내부에서 생성된 Noise에 본질적으로 더 취약하다는 점입니다. 또 다른 요소는 MEMS 가속도계가 통합된 전자기기를 갖춘 능동형 센서라는 것이며, 반면에 솔레노이드 지오폰은 수동형 센서입니다. 인스탄텔(Instantel)에서는 시간 영역에서 이른바 "Wandered(신호처리과정에서 발생하는 불규칙한 변동으로 전기적인 노이즈로 간주됨)" MEMS의 저주파수 성분을 측정했습니다. 표준 편차를 살펴보고 루트 평균 제곱 (RMS) 수준으로 평균 값을 계산하면 소음 신호가 진동 임계값을 초과할 확률이 매우 높다는 것을 알 수 있었습니다. 이는 MEMS 가속도계의 내재적 설계로 인해 노이즈가 실제 발생되는 진동신호의 일부가 아님에도 불구하고 매우 낮은 수준의 진동을 측정해야 할 때 오차를 발생할 수 있다는 것을 의미합니다. 솔레노이드 방식의 지오폰은 MEMS 가속도계와 달리 구조적으로 이러한 오차를 발생할 확률이 매우 적으므로 측정 데이터를 더욱 신뢰할 수 있습니다.
5.규제 준수
발파 소음 진동의 측정 및 모니터링에 사용되는 장비는 국제 표준 측정 기준에 성능이 만족하는지에 대한 검토도 매우 중요 합니다. 이는 사람 및 대한 보호를 하기 위함으로써 데이터를 정확하게 기록하고 보고하는 것은 건설업자와 고객사 모두에게 중요하며, 이는 법적 검토에 문제가 없게끔 측정되어야 합니다.
이 분야에서 장비 성능과 관련된 두 가지 국제 표준은 아래와 같습니다.

ISEE(국제 폭발 공학회, International Society of Explosives Engineers Performance Specifications for Blasting Seismographs, ISEE-2017)와 DIN(독일 표준 협회, Deutsches Institut für Normung, DIN 45669)입니다. 이 두가지 표준을 만족하는 장비라면, 진폭 범위, 주파수 범위, 허용되는 최대 내부 소음, 선형성, 위상 응답 및 교정 요구 사항을 포함한 표준의 모든 부분을 충족한다는 것을 의미합니다.
예를 들어, ISEE에서 측정 장비에 요구되는 사양은 최대 진폭 범위를 초당 254 mm (10인치/초)로 요구하며 주파수 응답은 2에서 250 Hz로 정하고 있습니다. ISEE 요구되는 사양을 충족시키기 위해서는 40.7 g까지의 가속도를 신뢰성 있게 측정할 수 있는 MEMS 가속도계가 필요합니다. 2, 4 또는 8 g MEMS 가속도계를 사용하는 진동 측정장비는 ISEE에서 요구하는 장비 성능을 충족시킬 수 없습니다.
결론
인스탄텔(Instantel)사의 테스트 및 분석 결과는 MEMS 가속도계를 사용하여 측정되는 진동의 주파수와 진폭이 실제 발생하는 진동 신호와 관련이 없는 잘못된 데이터를 기록할 수 있다는 것을 보여줍니다. 고주파는 MEMS 가속도계가 측정하는 진동 수준의 정확도에 영향을 줄 수 있습니다. 매번 다른 적용 분야에서 진동을 측정할 때 측정될 정확한 주파수와 진폭 값을 예측하는 것은 불가능 합니다. 이러한 점은 데이터를 정확하고 신뢰할 수 있는 데이터로 측정하는 것을 어렵게 만듭니다. 인스탄텔(Instantel)사의 테스트 및 분석결과에서는 MEMS 가속도계를 사용할 때 고주파가 데이터 부정확성의 주요 원인임을 분명히 확인하였습니다.
MEMS 가속도계는 설치 방법의 편리성으로 인해 매우 쉽게 사용할 수 있다는 장점이 있지만, 명백히 솔레노이드 방식으로 제작된 지오폰의 신뢰성에는 비교가 되지 않습니다.
잘못된 측정으로 인해 만들어진 데이터는 업무의 중단 및 정부로부터 규제를 받을 수도 있습니다.
이는 법적 규제를 준수하지 않아 법적 소송에 휘말릴 수도 있으며 이는 고스란히 잘못된 장비를 사용한 사용자가 감내해야 될 수도 있는 부분 입니다.
진동 측정장비 제조업체는 자신들의 장비가 국제 표준 기구에서 요구하는 사양을 준수한다는 근거를 제시할 수 있어야 합니다. 저희는 발파소음진동 측정장비의 검토 및 구매 시 이러한 사향을 반드시 확인하고 구매할 것을 강력히 권장합니다.
인스탄텔(Instantel)은 위에서 언급된 문제에 대응하는 발전된 MEMS 기술을 계속해서 모니터링할 것입니다.
결론 요약
1. 진동 정류 오차 (Vibration Rectification Error, VRE)
• VRE는 MEMS 가속도계의 출력 데이터에 저주파 대역에서 오프셋을 생성합니다.
• VRE는 MEMS 제조 공정에 내재된 비선형성 및 비대칭성으로 인해 발생합니다.
• 주파수와 진폭이 변하는 적용분야에서 VRE는 예측할 수 없습니다.
• 테스트 결과, MEMS 가속도계는 모든 채널에서 과도한 속도 진폭과 유효하지 않은 측정결과를 나타내었습니다.
2. MEMS 가속도센서의 구조적인 한계
• MEMS 가속도계는 솔레노이드 지오폰보다 고주파에서 더욱 민감합니다.
이로 인해 잘못된 측정이 될 수 있고 이로 인해 측정 및 운영이 제한적일 수 밖에 없습니다.
• MEMS 가속도계는 내부에 고유한 측정 오차가 발생할 수밖에 없으며, 이는 MEMS 가속도계 구조적인 한계입니다.
3. 앨리어싱(Aliasing)
• MEMS 가속도계는 솔레노이드 지오폰보다 앨리어싱에 더 민감합니다.
• MEMS 가속도계는 동일한 데이터 무결성을 제공하기 위해 훨씬 더 높은 속도로 샘플링되거나 더 강력하게 필터링되어야 합니다.
4. 노이즈 및 노이즈 플로어(Noise Floor)
• MEMS 가속도계는 내부에서 생성된 노이즈에 더 취약합니다.
• 매우 낮은 수준의 진동 측정이 요구 될때, MEMS 가속도계는 랜덤한 노이즈를 발생시킬 수 있으며 이는 측정 오차를 유발할 수 있습니다.
5. 규제 준수
• MEMS 가속도계는 국제폭발공학회(International Society of Explosives Engineers, ISEE)) 규정을 준수하기 위해 최대 40.7 g까지 가속도를 신뢰성 있게 측정할 수 있어야 합니다.
• 2, 4 또는 8 g MEMS 가속도계를 사용하는 진동 모니터는 ISEE 기준에 만족하는 사양을 충족시킬 수 없습니다.
출처: 인스탄텔(Instantel)
ITS SNS



서울 본사 : 서울시 송파구 송파대로 201(테라타워2차), B동 921호 T. 02-2135-5672 F. 02-2179-9111 E. info@its21.co.kr
강동 지사/기술연구소 : 경기도 하남시 미사강변한강로 135(스카이폴리스), 다동 7층 739호 T. 02-2135-5672부산 사무소 : 부산시 부산진구 엄광로176 (동의대학교, 산학협력관 802-2호) T. 02-2135-5672
COPYRIGHT ⓒ ITS CO.,LTD. ALL RIGHTS RESERVED